WDS 2026 – Prince Sattam bin Abdulaziz University R&D showcases new land and naval unmanned systems
With the Vision 2030 deadline approaching, many entities in the Kingdom of Saudi Arabia (KSA) are accelerating their activities in order to meet that time limit, one of the targets being a 50% autonomy in defence acquisitions. Academia is doing its part, the Prince Sattam bin Abdulaziz University (PSAU) research and development department being heavily engaged in a series of projects concerning unmanned systems, mostly land- and sea-based, many of them being exhibited at the World Defense Show

Starting from land, the PSAU stand hosted a multi utility tracked unmanned ground vehicle (UGV). The dry mass is slightly over 1,000 kg, normal payload being the same, although it may go up to 1,200 kg, EDR On-Line understood. The UGV is fully designed and produce in the KSA and is powered by electric motors ensuring a maximum speed of 10 km/h, with a 1,400 Nm torque. Endurance depends on the battery pack installed, minimum being 3 hours, a separate battery pack being installed to power the payload. The platform is fitted with rubber tracks and can overcome 32° (62.5%) gradients while moving on 22° (40%) side slopes; it can tow up to 3,000 kg. Currently the UGV developed by the PSAU is teleoperated by radio control at distances up to 5 km, however the university R&D team is working on further building blocks that will provide the platform with increasing degrees of autonomy. At WDS the UGV was fitted with a pan/tilt head; on top of it was installed a C-UAS jammer, also developed at PSAU, operating in the 400 MHz-6 GHz band with a 3 km range. According to information provided by PSAU representatives, the platform is undergoing laboratory tests and vibration tests, and is considered at TRL 5-6, to get ready for certification tests, while the jammer is at TRL 6.



Remaining on land, three different models of quadruped robots were showcased. All are in the prototype stage and at TRL 5-6; here too autonomy building blocks will be added in a spiral process, that will also see other improvements, such as sensors in the robot feet, feedback allowing to consistently improve the system behaviour adapting it to the surface. The quadruped robot family name is Jamale, Jamal 1 being the smaller one, designed for surveillance missions. Its overall mass is 20 kg and can carry a 5 kg payload. Its sensor suite includes cameras and 4D LIDARs; it has 12 degrees of freedom, and the battery ensures a 2-hour endurance. In the Jamal 1 only masses vary, both being multiplied by three. As for the Jamal 3, overall mass goes up to 110 kg, payload being 50 kg, however here endurance is reduced to 1 hour. The PSAU R&D department started developing the family from Jamal 1, developing software and algorithms that have then be used as the base for developing the two bigger robots.
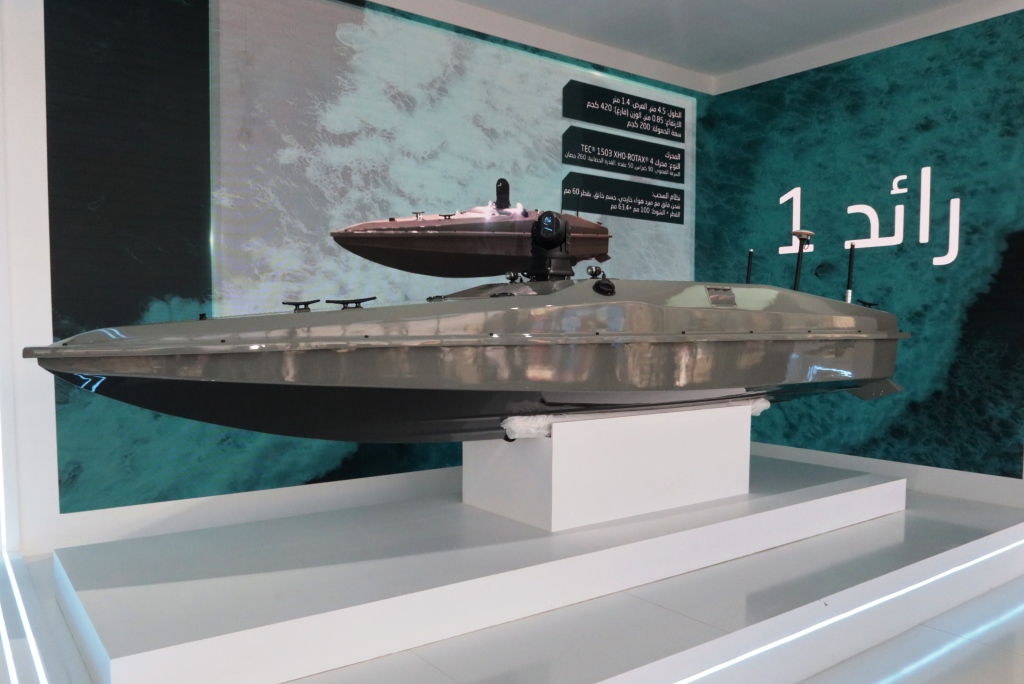
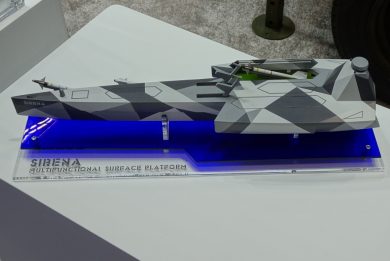
Switching to the sea, on the surface PSAU is developing an Unmanned Surface Vessel (USV) 4.5 metres long, with a 1.4 metres beam and a dry mass of 420 kg. The planning hull, powered by a 260 hp Type 1503 XHO Rotax 4-Tec supercharged engine with intercooler and close loop cooling system allows the USV to reach a maximum speed of 50 knots. The USV has a 200 kg payload capacity; the mock-up visible at WDS was fitted for intelligence, surveillance, and reconnaissance missions, the gimballed optronic sensor being installed at the centre of the boat. The gimbal carries two cameras; the first one is a CMOS day/night low level camera with a 1920×1080 pixels full HD sensor and a x33 optical zoom; a laser illuminator allows seeing at 500 metres even in complete darkness. A second Full HD camera completes the optronic suite. EDR On-Line understood that the USV is at TRL 5, first trials having been conducted in a pool, no trials at sea having yet been conducted. A surface autonomous vessel, a catamaran-type multi-mission USV was also visible at the Riyadh exhibition.

Among various underwater systems, the newest product was the multi-mission remotely operated vehicle (ROV) for maritime security and safety, mine disposal being its main role in military use. The ROV is 1.5 metres long, 0.7 metres wide and 0.6 metres high, and has a dry mass of around 60 kg; it can carry a payload of 45 kg maximum, which is installed in payload area in the lower part of the vehicle. Two couples of horizontal ducted propellers provide the forward thrust ensuring a 4 knots maximum speed, while two vertical thrusters at the front ensure movements on the vertical axis, a smaller horizontal thruster ensuring lateral movements, giving a six degree-of-freedom and a precise positioning capability. All thrusters are powered by electric motors, the ROV operating via a tether that brings DC power as well as commands and video feed. A whole suite of sensors is fitted to the ROV, including a 1080 pixels HD camera, a pressure depth sensor, a water leakage sensor, a downward looking ranging sonar and a multibeam imaging sonar, the latter allowing to detect and localise submerged objects even in zero-visibility situations. The payload can include a robotic arm, explosive charges to disrupt bottom mines, and others. The next step will be the addition of an automatic positioning capability. The system is currently considered at TRL5, PSAU representatives awaited the end of WDS to restart testing to bring the system one notch up in the TRL scale.
Being a university PSAU will obviously not get into the production process, and therefore when the projects will be sufficiently mature these will be handed over to a national company, to maintain the 100% KSA content, as underlined by the university representatives.
Photos by P. Valpolini