

SeaFuture 2023 – Graal Tech unveils X300 MCM Compact
At Seafuture 2023, Genoa-based Graal Tech, specialized in the development of autonomous underwater vehicles (AUVs) and equipment, unveiled the X300 MCM Compact vehicle.
The X300 MCM Compact is the latest addition to the family of mission-tailored vehicles based on the X300 model that has already found success in the military sector, having been delivered to the Italian Navy and selected by international customers in addition to civilian operators.
“The X300 MCM Compact version is the answer to the market request for a vehicle with enhanced manoeuvrability, and easy to deploy and recover, to be used for countering mines and improvised explosive devices. The MCM Compact version is based on our innovative X300 vehicle and is characterized, by high manoeuvrability obtained without any moving control surface. A small vehicle featuring open control system and capable to accommodate an integrated suite of sensors. With its compact size and advanced autonomy, the X300 MCM Compact it’s a true game-changer among lightweight AUVs”, Andrea Caffaz, CEO of Graal Tech, told EDR On-Line.
The X300 in its different configurations has been provided to the Italian Navy’s Naval Experimentation and Support Centre (CSSN) for the BOOMER (reconfiguraBle autOnOmous systeMs for undErwater warfaRe T&E) programme where it is used for a variety of tests and evaluation activities, including the participation to the NATO REPMUS exercises in Portugal since the 2021 edition.
“More recently we have been working with Fincantieri group and its Fincantieri NexTech company, to which we provided our X300 AUVs and contributed to the development of the launch and recovery system and integration on their SAND unmanned surface vehicle demonstrator,” highlighted Andrea Caffaz. The SAND, equipped with X300 AUVs, is planned to participate to the REPMUS 2023 edition, according to Fincantieri statements.
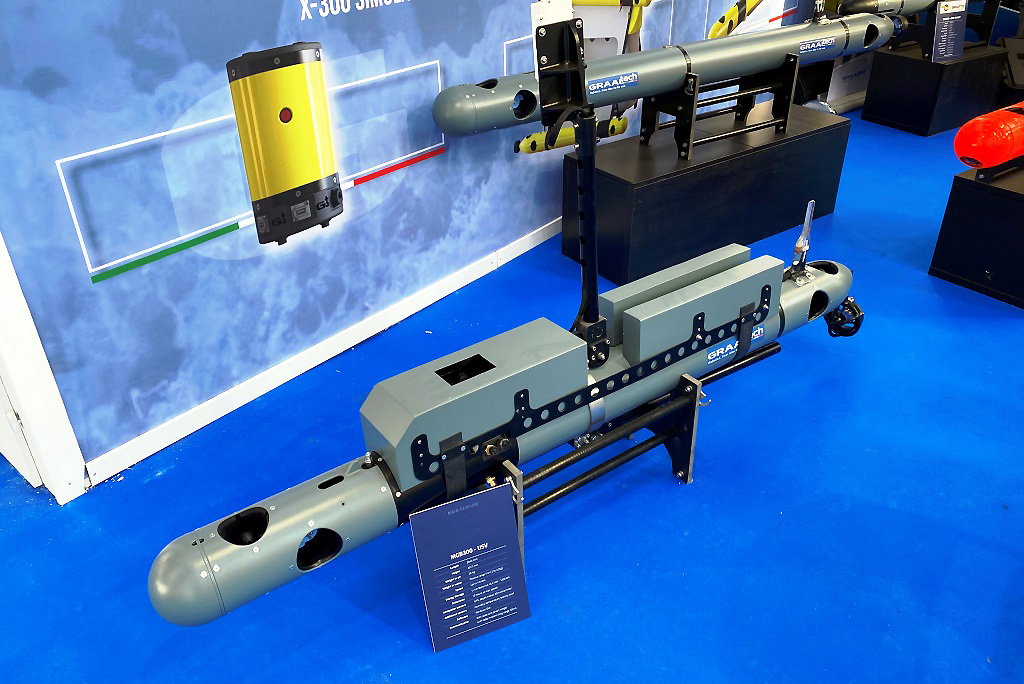
The X300 in its different configurations

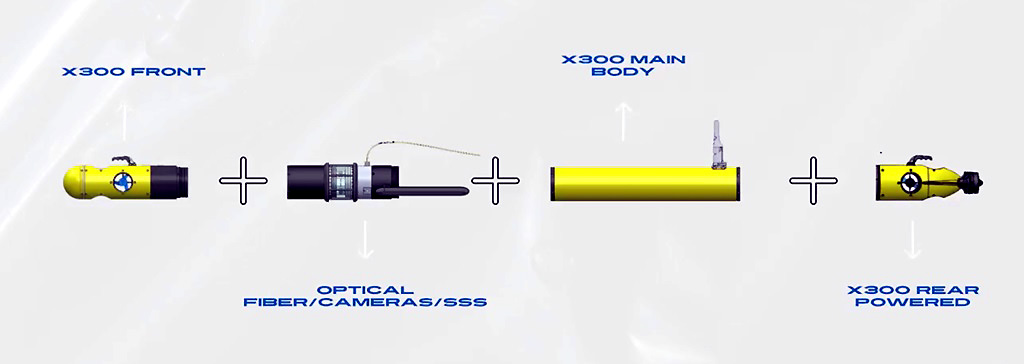
The X300 is a torpedo-shaped AUV capable of executing a wide variety of missions in the fields of Oil&Gas, Defence and Security, Oceanography and Environmental Monitoring. “It is made up of a pair of carbon fibre cylinders connected to two terminating wet sections where steering and propelling thrusters are located, together with a bladder enabling to change buoyancy. One of the main features of the X300 is its high manoeuvrability, obtained without any moving control surface. As for manoeuvrability the motion in the surge direction is produced by one bi-directional rear thruster. Steering motions, in both vertical and horizontal planes, are made possible by two pairs of additional bi-directional thrusters placed, in crossed configuration, at the vehicle bow and stern,” Alessio Turetta, Director Business Development explained.
“Conventional torpedo-shaped AUVs can execute manoeuvres only above certain speeds, as the steering action is produced by the hydrodynamic lift given by control surfaces. On the contrary , the X300 can pivot even at no-speed and can translate, either horizontally or vertically. Additionally, the vehicle can also modify its buoyancy, thanks to the ballast chamber in which water can be injected or ejected, and can control its hydrostatic attitude through the internal displacement of the battery pack,” Alessio Turetta highlighted.
The combined use of buoyancy and attitude controls further increases the vehicle motion possibilities, actually making X300 a hybrid vehicle with the motion capabilities of standard self-propelled AUVs, remotely operated vehicles (ROVs), and even low-power consuming oceanographic gliders.
“One of the remarkable features of the X300 is its versatility, especially when it comes to operating in payload-driven mode. Picture this: the vehicle is transformed into a carrier, capable of transporting a payload decked out with mission sensors and a powerful intelligence CPU. In this mode, the vehicle takes commands directly from the payload’s CPU, putting the user in full control through their own software.” A set of predefined libraries provides access to all the vehicle sensors and actuators and to the communication devices (the WiFi link on surface and the acoustic modem, available as an optional feature, for underwater communications). “In this way the customers’ Uapps (Underwater App) will get total control of the X300 AUV, and they will be able to test in the real underwater environment their developed controlling algorithms or their coordination strategies between multiple AUVs. Available templates will help them to code their Uapp,” Caffaz said.
The integration of a mission payload is extremely easy, according to Graal Tech representatives, as it can be inserted in a dedicated module among the two section hosting the batteries and the vehicle control suite. “By designing the payload module in order to be neutrally buoyant and balanced, any sensor or underwater instrument, be it commercially available or custom-made, can be transported by the X300 without affecting its navigation parameters and without requiring any calibration operation,” he added.
The baseline platform is 2.22 meters long with a diameter of 155 mm and a weight (in the air) of 29 kg without payload. Capable to reach a depth of 300 meters and a maximum speed of 5 knots, the X300 is equipped with a Li-Ion, 24 Volt, 1,200 Wh battery and has an endurance of 14 hours in the AUV mode and days in glider mode. It is equipped with GPS, depth meter, inertial measurement unit (IMU), Doppler Velocity Logger (DVL), radio and acoustic (optional) link.
“Another peculiarity of Graal Tech vehicles is reconfigurability. Starting from the base model X300, it is possible to generate different combinations of vehicles, such as for example the Explorer version for underwater inspection and seabed objects search, or an autonomous surface vehicle (ASV) equipped with a long-range radio device and an underwater acoustic modem (Mobile Gateway Buoy, MGB), or the R300 model with three short X300 AUVs connected together for carrying bulky and heavy payloads thank to a triangular aluminum frame, supporting the installation of many different equipment of interest. All this is possible thanks to the modularity of the system that, starting from a series of basic elements, allows us to propose to the customer the most suitable configuration by assembling it like LEGO bricks,” Caffaz highlighted.
The X300 has also a simulator for training and experience purposes. “The X300 Simulator is one of the new Graal Tech products designed to help customers that want to experience the use of X300 AUV before going at sea. It is a standalone desktop simulation tool, equipped with the same software and the same processing units as the actual X300 AUV, to accurately replicate the vehicle’s behaviour within a digital environment. The AUV dynamic model and receiving stimuli from the virtual environmental are implemented in the simulator, as well as graphic libraries, for a 3D rendering enabling the customer to perform very realistic underwater missions.
The X300 MCM Compact
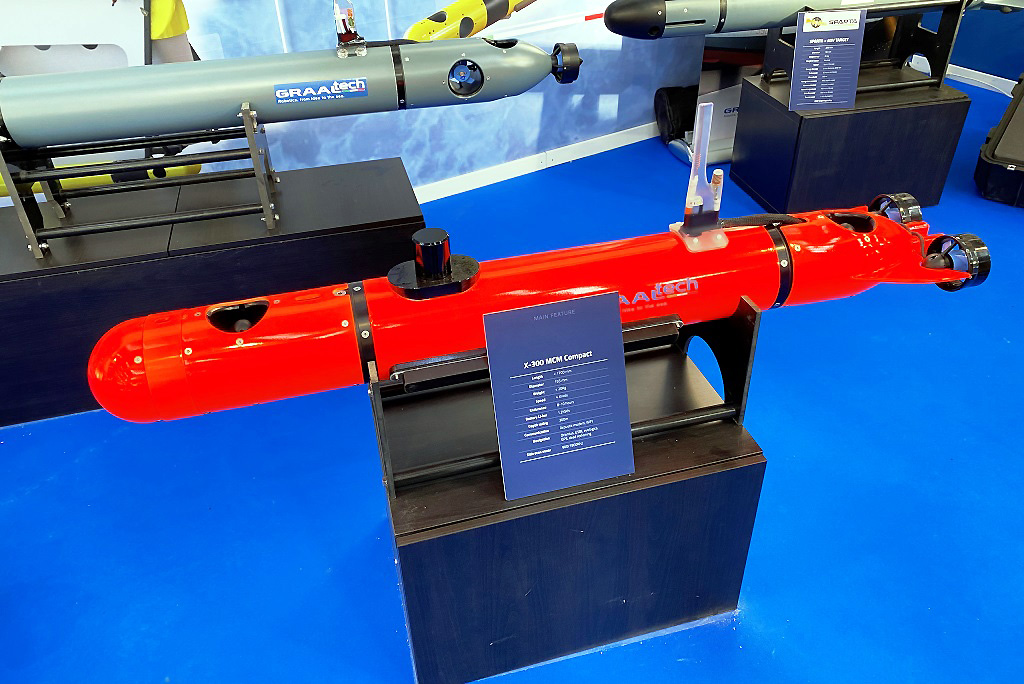
Unveiled at Seafuture 2023, the X300 MCM Compact differs for a propulsion system featuring two (instead of one) bi-directional rear thrusters, a length less than 1.7 meters, a 155 mm diameter, a weight under 20 kg, a 300 meters depth rating, a speed of 4 knots and a 1,200 Wh Li-ion battery package providing an 8-to-10 hours endurance. The one-man portable AUV for MCM missions is equipped with a high resolution 900/1800 kHz side scan sonar, IMU, DVL, forward looking sonar and camera, alongside an acoustic modem, as basic payload.
“The X300 MCM Compact has already a military launch customer”, said Andrea Caffaz without providing further information, adding only that the system has attracted interest by other potential customers in the civil and military domains.
The company and its X300 AUV family is involved in a series of research and development programmes with both the Italian MoD’s General Secretariat/National Armament Directorate, other companies, universities and research centres. Together with FlySight and ISME (Interuniversity Center of Integrated Systems for the Marine Environment, a consortium of Italian universities working in the marine technologies and oceanic engineering), Graal Tech is involved in the PACMAN programme to conduct the localization, classification and identification of targets directly on board the AUV using artificial intelligence and automatic target recognition algorithms.
The DAMPS programme together with WSense and ISME is aimed at planning, changing and assessing programmable and modular sensors for passive acoustic monitoring through a team of cooperating AUVs.

The SPARTA (Self-Propelled ARtificial-Target) programme together with Tecnav Systems, will realize the prototype of an autonomous artificial target for ASW training. It will reproduce the maneuverability of a submarine, and will be able to be equipped with several modules to execute the functions of sonar repeater, torpedo acoustic head repeater, generator of acoustic and magnetic signature, scenario reconnaissance, and payload transport. The system is capable to emulate different types of signatures which allows it to simulate submarines, torpedoes as well as surface vessels. It will also be able to cooperate with other vehicles to realize a tracking range and for payload transport purposes. The vehicles can easily be dropped at sea, recovered and stored in operational surface ships. It can navigate with speed up to 7 m/s at a 150 metres maximum depth. The company also developed the expandable mine disposal system for the HUNTERWATER programme headed by L3Harris Calzoni, aimed at realizing an innovative methodology for detecting and deactivating naval mines through the coordinated use of marine unmanned vehicles, which was also unveiled during Seafuture 2023.
Photos by L. Peruzzi


