

IAV 2024 – Japan looks for new technologies aimed at amphibious vehicles and hybrid propulsion
More and more present on defence exhibitions, the Japanese defence industry and the country MoD are involved in research programmes mostly aimed at the development of a new amphibious assault vehicle and of new hybrid propulsion solutions
With a land defence industry that started since the 1960s to develop nationally designed armoured vehicles, the first being the Type 61 Main Battle Tank (MBT), Japan has since considerably improved its capabilities, fielding the Type 10 MBT in the early 2010s and the Type 16 Manoeuvre Combat Vehicle in the second half of that same decade.

To do so a series of new technologies were developed for the Type 10, in the mobility area a compact 1,200 8-cylinder engine providing 1,200 hp, a continuously variable transmission (CVT), hydropneumatics suspensions capable to modify the vehicle height, pitch and roll angle, and lightweight tracks, while new APFSDS ammunition and an automatic loading system were developed to increase firepower while reducing the crew to three members. As for the Type 16, a downsized 4-cylinder engine providing 520 hp was developed together with the all-wheel drive powertrain and hydropneumatics suspensions, while a new 105/52 mm low recoil gun system was designed, barrels being produced under license. Overall, a C4I system brings together armoured assets allowing information sharing and coordination.
At the International Armoured Vehicles Conference organised by Defence IQ, which took place January 21-25 in Twickenham, London, a briefing was provided on how the Japan military is looking at the future. Currently the country industry and military entities are considering two main development areas; one is the need for amphibious vehicles, manned and unmanned, capable to operate in the southwestern region. Here some 200 islands are at risk, and Tokyo would have to anticipate enemy moves or to recapture them from the enemy, should they be invaded. The second area of interest for new technologies is also part of mobility, and considers new propulsion solutions, to cope with increasing need for on-board power, the need to reduce consumption, and that of improving mobility and stealth.
These programmes involve the Japanese Ministry of Defence and more precisely the Acquisition Technology and Logistic Agency (ATLA). The Agency is responsible for ensuring technological superiority and quickly respond to operational needs, providing project management to ensure efficient acquisition of defence equipment, strengthening international technology cooperation, maintaining and strengthening defence technological bases. It has also an audit function aiming at reducing equipment costs.

Starting from the amphibious issue, Japan launched years ago an ambitious programme named FAT-R, from Future Amphibious Technology Research, which aimed at obtaining data to develop a new amphibious vehicle capable of considerable improvements in terms of manoeuvrability at sea compared to the in-service AAV-7 RAM/RS. The new vehicle requirements call for a cruise speed afloat greater than the 6.5 knots of the AAV-7, while it must be able to get over the terrain at the shoreline, while the AAV-7 capacity when hitting the beach is limited. As for operations on land it should at least have the same performances of the current vehicle in service with the Japanese Ground Self-Defense Force (JGSDF), the Amphibious Rapid Deployment Brigade which is part of the land forces. The forecasted Gross Vehicle Weight (GVW) is short of 40 tonnes, compared to the 26 of the current tracked amphibious vehicle. It must maintain seaworthiness in high sea state, the AAV-7 being limited to cruise in Sea State 3
The FAT-R programme started in 2017 with simulation models, the following year high water speed technology starting to be part of the research. In 2019 Japan joined forces with the United States, these bringing the knowledge acquired during the Expeditionary Fighting Vehicle (EFV) development programme, which was axed in early 2011. Japan provided some components to be tested, mainly in the propulsion area. This allowed developing scale models, from which two full-scale models were designed, one for shoreline manoeuvrability and one for high water speed. In 2019 a joint Japan-US research on Next Generation Amphibious Technology (NGAT) was initiated and is still ongoing, while in 2020 the development of a full-scale test bed was started.
According to the briefing, to allow a tracked vehicle to overcome a coral reef shoreline the use of tracks only is not sufficient, as this will slip and will not generate a sufficient driving force, the same being true for waterjets thrust only, as this will lack the upward driving force. Hence only the combination of the two allows to cope with this issue, providing the available power generated by the engine is sufficient to generate enough energy in both propulsion systems, tracks, and waterjets. This is what the AAV-7 does, however the 525 hp that powers its mobility systems seems not enough for ensuring the performances required by Japan.
This is why a 12-cylindre V-type water-cooled engine providing 3,000 hp was designed, together with the appropriate CVT and power transfer module. In-arm suspensions and light weight rubber tracks were also purposely developed.
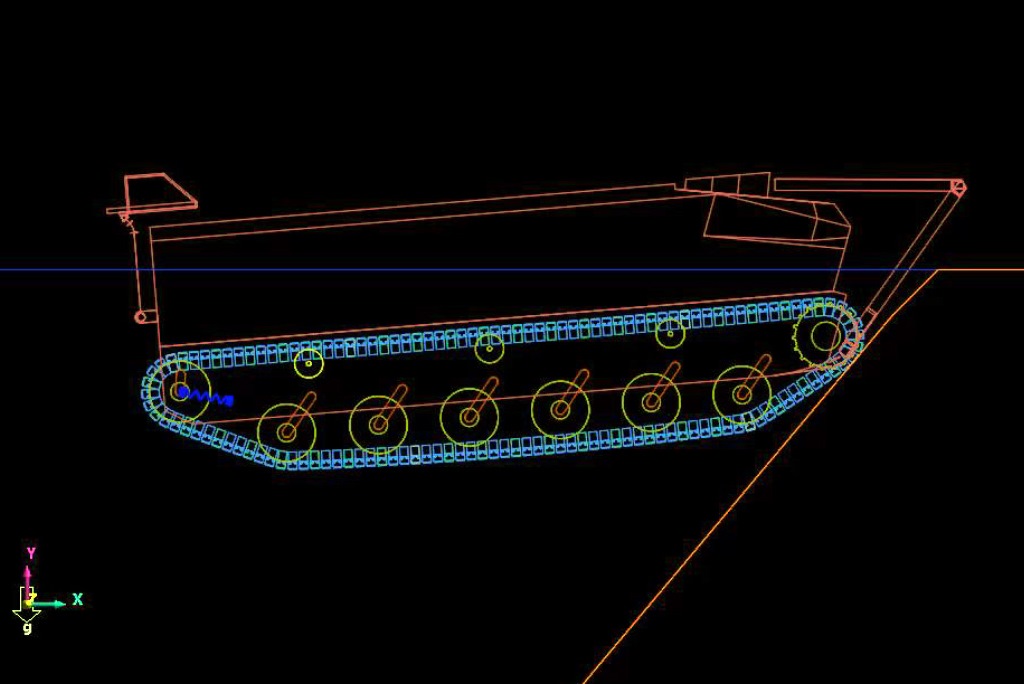
The engine is located around one third of the vehicle, with the transmission at the front and the two waterjets at the rear. Simulations have shown that, considering the engine power and even with the increased mass, this solution would allow the vehicle to cope with a reef with a 50° slope angle and a 0-metre water depth on the upper surface, the full-scale test bed having confirmed those results albeit during tests water depth on the upper surface was 0.5 metres.
Not much was said about high-speed solutions, a conspicuous trim vane being visible in the pictures shown in the presentation, with a lower structure that is moved forward, the system increasing the length of the vehicle, the waterline length of a boat being directly linked to its maximum speed. Clearly the 3,000 hp engine and the effectiveness of the two 1,500 hp waterjets are other key issues in the speed equation, however it is unclear if speed tests have already been conducted.
Based on the outcome of FAT-R, ATLA is planning to initiate the research on unmanned amphibious vehicles, the idea being having a manned platform capable to control several unmanned ones, the latter being used as forerunners in an island recapturing operation to minimise casualties.
Coming to propulsion, Japan is looking at hybrid diesel-electric solutions, the same as many other nations. While several countries look at commercial solutions as a starting point, Japan considers that a hybrid system for armoured vehicles requires high torque and low rotational speed, the opposite of what is adopted on passenger cars where high rotational speed and low torque systems are used. The other issue that differentiates military from commercial use is environmental resistance, armoured vehicles being designed to operate on rough terrain, which means problematic vibration regimes especially when considering tracked vehicles.
A first research programme was conducted in FY2011 to FY2016 that led to the development of a series-hybrid tracked test vehicle that could run in three modes, diesel, electric or hybrid. In the all-electric mode, it was able to run for one hour at 10 km/h speed. Of similar class of a Type-73 armoured personnel carrier, the key elements of the programme were the battery pack, the engine generator, the converter, the electric motor, the inverter, the driving and monitor devices being adapted to the new propulsion system. Due to the higher torque acceleration was considerably improved, while a 44% fuel consumption improvement was verified. However, no indication of the mission profile was provided during the briefing. Japan cooperated with the US, more specifically with the U.S. Army Tank-Automotive Research, Development, and Engineering Center, establishing common test operations procedures for tracked and wheeled hybrid vehicles.
The following research programme underway by ATLA, which was initiated in 2020 and will last until late 2025, is about a modular high power density hybrid system. Here the test vehicle is wheeled and will be fitted with a parallel-hybrid propulsion package, the aim being to exploit as much as possible existing propulsion systems with relatively minor change, adding the motor generator, the battery pack and the inverter/converter, while maintaining the main diesel engine. Here too Japan will work alongside the United States.
Photos courtesy Japan MoD

