

FEINDEF 2023 – A new innovative UUV family by Navantia, SAES and Perseo
Unmanned systems are increasingly present in all domains, underwater systems usually known as UUVs extending their mission flexibility. Three Spanish companies, led by Navantia, joined force to produce an innovative UUV family, which smaller member was unveiled at FEINDEF
Navantia Sistemas, the System Business Unit of Navantia, is responsible for designing the route for future unmanned vehicles, Cristina Abad Salinas, the BU director explains to EDR On-Line. “We have an Unmanned Surface Vehicle already in operation, and are designing new ones, in order to add capabilities,” she told us. Navantia is looking to new tools in order to add further capabilities, and it thus decided to move in the Unmanned Underwater Vehicles (UUV) area. To this end the leading Spanish naval group joined forces with SAES, controlled by Navantia through SAES Capital, and with Perseo Techworks, specialised in UXVs, numerical simulation, onboard electronics, rapid prototyping, additive manufacturing, Internet of Things, and artificial intelligence. “We are still searching for an attractive name,” she told us, underlining the integrator role that Navantia has in this project.

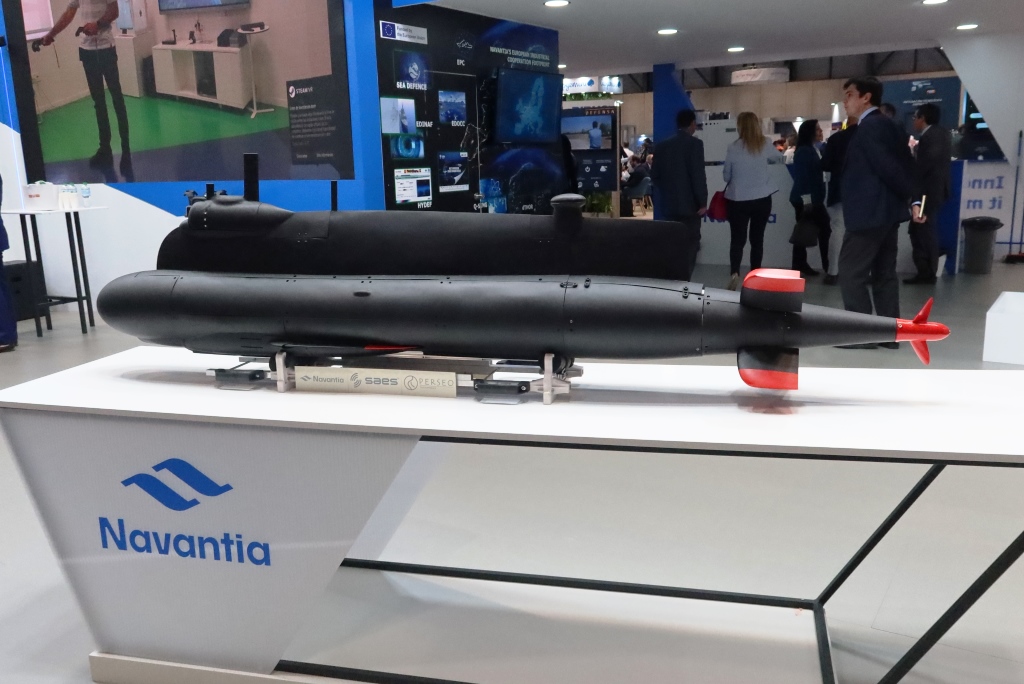
To get detailed information on the exhibited pototype, EDR On-Line met Sergio Olmos, a naval architect and marine engineer who is the Technical Director at Perseo. “What is exhibited at FEINDEF is not a model, as it is the second prototype of what is in real a hybrid between a USV and a UUV,” he explains. EDR On-Line understood that the prototype was busy in trials until a few days before the opening of the Madrid exhibition. It is the smallest member of the family, and is defined as “S” model for small, the other two models, still on the computer screen, being the “M” for medium and the “L” for large.
The design of all three UUVs is based on a common architecture, which key feature is that they do not rely on ballast for immersion, but on two short wings located under the UUV, which deploy when the unit starts its underwater mission, providing a down-lift, acting the opposite way of what a wing does on an aircraft, attitude control being fully hydrodynamic. According to Perseo this allows energy saving compared to the ballast solution. Another distinctive feature of the new UUV family is the distributed electric propulsion, that mimics the architecture of surface ships propulsion, with several motors attached to the single shaft, the number of active motors depending on the power needed at that moment, this solution allowing to optimise efficiency.

On the prototype visible at FEINDEF the 3D-printed screw had two blades, however EDR On-Line understood that screws with three or four blades are also available, the choice depending on the mission. No more details were provided, however the choice is quite probably linked to priorities given to speed versus noise, the system being defined as “very silent” by industry. A scenario with two UUVs deployed in a mine-countermeasure (MCM) operation visible at the AES stand included two UUVs with a three-blade screw. Another interesting feature is that if the UUV is towed by a surface boat, motors can become generators and recharge on board Lithium-Polymer batteries. Four mobile rudders in X configuration ensure the UUV control, the boat being controllable even if one of the rudders is lost. Another key feature is the neural network installed onboard, which constitutes the backbone on which all systems operate.
Considered a hybrid USV/UUV vehicle family, as the system can also operate afloat without deploying its wings; when surfaced navigation is provided by a GNSS/INS unit ensuring precise location through the satellite signal that updates the inertial platform. In fact the UUV is equipped with several GNSS receivers, redundancy allowing to counter spoofing by the enemy, comparing data among them as well as with the INS platform. When diving the GNSS signal of course is lost, the onboard MCU (Micro-Controller Unit) controlling the vehicle using the inertial platform and the USBL (Ultra-Short Baseline) acoustic positioning system.
A second and more powerful computing unit, the GPU (Graphic Processing Unit), is installed on board the UUV; this is tasked for managing the data coming from the sonar and from the thermal camera, providing artificial vision to the operator. Thanks to the data-base available on board and to AI-based algorithms, those sensors allow object identification and, based on the knowledge of the dimensions of known objects, they also permit to establish the distance of the UUV from those objects adding to situational awareness.
Both the hydrodynamic hull and the inner subsea housing are 3D printed using an acoustically transparent plastic materiel. This allows to have sonar or USBL devices inside the hull while maintaining sensors performance. Another considerable advantage given by this material is that it makes very difficult to spot the UUV using sonar sensors, a propriety that will become very helpful when the system will be developed in the loitering munition version.

For communications, the UUV is fitted with a number of flat antennas ensuring comms in the 4G/5G, WiFi, NRF and LoRa bands, floating antennas being also available.
As said from inception, the three companies are not developing a single UUV but a family of them. The family concept applies to the mission, mine-counter-measure (MCM), intelligence, reconnaissance and surveillance (ISR), and last but not least loitering munition, but also to dimensions.
The “S” model is around 2.3 metres long, its body has a 200 mm diameter, the wingspan is around 500 mm, and the height approximately 400 mm including antennas. The boat weighs 43 kg and can carry a 40 kg payload, two strong points being available under the hull. In the MCM mission one of these will definitely host a side-looking sonar. Both strong points are actuated, therefore they can be used to deploy mines, listening devices or other objects. Thanks to its small size the “S” model can be fitted into a container and released from a 533 mm torpedo tube. The neural network includes an auto-docking application that exploits sonar and/or electro-optical sensors to bring the UUV inside a docking “box”, which features an open side and can host more than one UUV, this allowing to deploy and recover multiple boats from a surface ship, the “box” acting as interface. The UUV was designed also to be deployed from rigid hull inflatable boats.

The “S” model can reach a maximum speed of 15 knots when diving, and 10 knots when surfaced. It can be fitted with two types of batteries, one with 0.5 kWh energy ensuring a 50 Nautical Miles (NM) range, a 1 kWh battery being also available that allows increasing range to 70 NM, endurance being around 12 hours. Solutions allowing battery recharging, as fitting solar panels to be used when surfaced, are under consideration. It is to note that the main power consumption is not due to propulsion but to on-board electronic, hence mission duration is the critical figure.
Starting development from the smallest of the family meant dealing with the most critical issues in terms of systems integration due to the size, a major problem being heat dissipation. Although “M” and “S” models are still on computer screens, some metrics were provided; the medium UUV roughly doubles the “S” dimensions, weight increasing to around 1 tonne, while the “L” version will again double dimensions compared to the “M”, reaching a displacement of 8 tonnes.
It is worth noting that a single ground control station can deal with up to 20 UUVs, the control software being currently integrated into the Navantia combat management system, and although not declared, this should mean that in the future UUVs of that family with different dimensions will be capable to operate together in a mission, adding considerable flexibility.
Although still in the development phase, the still unnamed “S” UUV will be deployed in Portugal next September where it will take part in the REPMUS (Robotic Experimentation and Prototyping using Maritime Uncrewed Systems) NATO exercise, where new unmanned assets are tested, Navantia also deploying a USV in that same context.
Photos by P. Valpolini


