

Fincantieri NexTech will take multirole SAND USV to REPMUS 2023 in Portugal
Fincantieri NexTech unveiled at Seafuture 2023 an enhanced version of its SAND (Surface Advanced Naval Drone) unmanned surface vessel (USV) operating as mother platform for autonomous underwater vehicles (AUV), which will be deployed operationally in a multi-domain environment for the first time during the NATO REPMUS 2023 exercise in Portugal next September
“We have fast-tracked the development of our SAND USV and its autonomous and remote-controlled operations capabilities and, working together with GraalTech – a company specialized in AUVs – we have laid the foundations for the evolution of our USV into a mother platform for AUVs capable to carry out a range of missions, from mine countermeasures to antisubmarine warfare, in a multidomain environment,” Fabrizio Orsini, International Sales Area Manager at Fincantieri NexTech, told EDR On-Line. “We are going to demonstrate an initial package of the SAND unmanned mothership capabilities during the NATO REPMUS 2023 exercise”.
Launched in early 2019, under a joint project between IDS (Ingegneria dei Sistemi, responsible for autonomous capabilities, communications and payload subsystems, now part of Fincantieri), Effebi (platform production and integration) and Meccano Engineering (Platform design authority) for civil and military applications, the programme has been later absorbed by Fincantieri NexTech, a cutting-edge technology subsidiary of the Italian shipbuilding group.
The SAND USV has been conceived as a multi-purpose unmanned platform capable of conducting several mission: Search and Rescue (SAR), environment monitoring, hydrographic service, mine countermeasures, maritime security, surface defence, special operations support, electronic defence, maritime interdiction and anti-submarine operations. These missions requirements led to a platform based on a self-righting planing monohull built in composite materiel, capable to operate up to Sea State 4. The hull and superstructures are characterized by a low radar, infrared and acoustic signature, although the large SATCOM antenna radome on top of the unique mast structure makes the platform easily detectable. However, this design was driven by an initial SAR-oriented configuration that is expected to change for homeland, maritime security, and in general military-oriented operations.

With a length and beam of respectively 16 and 4 metres and a full load displacement of 25 tonnes, the USV has an overall height of respectively 8.7 and 3.7 in operating and road transport conditions. The SAND is equipped with two 588 kW at 2300 rpm diesel engines connected to two waterjets ensuring a maximum speed of 30 knots and an endurance of 48 hours at 12 knots or 73 hours at 8 knots. The platform has been designed to be classified by RINA as B-Offshore Navigation.
“The SAND maintains an optionally piloted capability with main bridge equipment and two crews operating stations, and is equipped with the Virtual Pilot suite that includes all the components required to remotely control the boat. It includes the ground control station, the high-performance data links and the onboard control station (OCS) interfaced with the boat sensors and actuators. The key feature of the Virtual Pilot suite is the capability of performing an effective autonomous route planning and execution that, combined with the on board situation awareness suite, will provide the more efficient and safer approach to the events in any scenario,” Orsini explained.
The on-board Virtual Pilot suite features a range of sensors enabling the platform to be compliant with the Convention on the International Regulations for Preventing Collisions at Sea rules, and today includes radar broadband automatic radar plotting aid, fiber optic gyro, dual differential GPS, speedLog, weather station and automatic identification system (AIS). A redundant command and control (C2) system and a datalink with low latency and high data throughput support the remote control through radio line-of-sight (RLOS) and beyond radio line-of-sight (RBOLS). Currently the SAND is equipped with RLOS suite being discussed later on.

Although operating autonomously, the platform and its payloads can be controlled by a team of operators working at the GCS developed by Fincantieri NexTech, based on the experience acquired with both remotely operated maritime and air system programmes of IDS. “The crew can count on a station with six multifunction screens organised in two superimposed rows of three displays each, together with one set of throttles and steering controls. In the configuration for the REPMUS 2023 experiment the lower screens are mainly dedicated to display conning feed, mission management and payload/sense and avoidance functions, while top row screens show the bow and stern 180° cameras around the ship alongside the electro-optical turret sensors picture. The platform and its systems work autonomously, a single operator being sufficient to manage the station and take action if and when needed. For more complex operations one or more operators can be added, a dedicated additional side console being used to operate the mission payload”, Orsini said.
“An incremental situational awareness programme will see the phased introduction of additional sensors, starting with video feed from a 360° cameras package, followed by the evaluation of potential additional sensors such as LiDAR (Light Detection and Ranging). We are leveraging on the successful trials carried out last year with the MARIN programme,” said Mirko Stifani, Product Leader Unmanned Systems at Fincantieri NexTech.
“The LiDAR is one of the technology we are evaluating to enhance the autonomous navigation. We are continuing to evaluate the sensor capabilities and development in order to assess its maturity and effectiveness for a future potential addition,” Fabrizio Orsini explained.
“The SAND is currently equipped with line-of-sight UHF data links, but we are working on the SATCOM capability, in Ku or Ka bands for mission C2, with a redundant Iridium C2 link”.

Initially designed for search and rescue operations, the SAND was equipped with four self-inflatable remotely deployed rafts and with two large displays with loudspeakers for communicating with rescued people. The platform focus has now been reoriented towards security and defence applications, working alongside manned platforms. The unmanned platform is mostly tasked either for dangerous operations, such as mine countermeasures, or for routine missions such as patrolling, allowing to reduce the number of personnel.

“The result is the development of a mothership unmanned platform for other autonomous vehicles. We have partnered with Genoa-based GraalTech that is already working with the Italian Navy, which contracted the company to provide its family of small modular X300 AUVs to the Service Naval Support and Experimentation Centre (CSSN), to develop together a launch and recovery system (LARS) for AUVs to be installed shortly onto our platform , in order to fast-track the development of the current configuration with the aim to use it in the NATO REPMUS 2023 exercise,” Stifani told EDR On-Line. GraalTech already participated with its own vehicles in the 2021 edition of the NATO exercise and more recently supported the CSSN with its suite of in-service vehicles.
Although the SAND demonstrator has carried out continuous sea trials campaigns in the company’s maritime facilities out of Tuscany to enhance autonomous operation capabilities, the SAND equipped with the AUV LARS has been moved to the facilities in La Spezia to conduct dedicated integration and operational trials since May. “We will continue this campaign to refine the mothership concept and enlarge the range of operations that will lead us to deploy the platform and its LARS with AUVs in REPMUS 2023,” Stifani said.
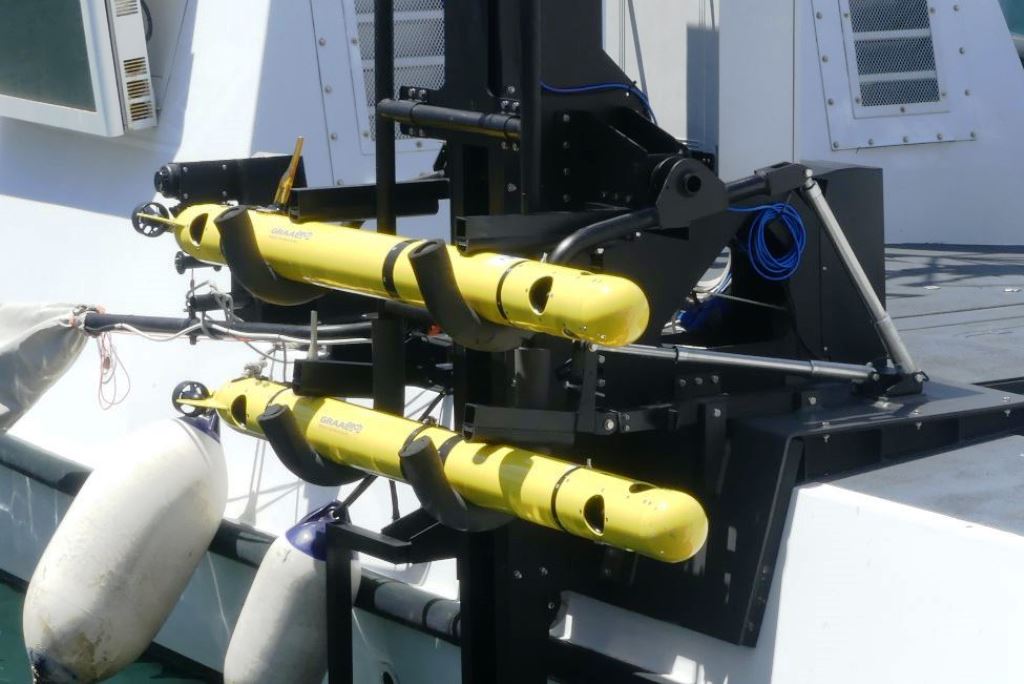
As showcased at Seafuture 2023, the SAND has been cleared of the inflatable rafts on the left side of the craft and now the unmanned platform features the LARS that is able to accommodate two X300 AUV, and the USBL (Ultra-short BaseLine) acoustic equipment to track the AUVs location once underwater, as well as new navigation aids and a dedicated camera that watches the LARS station.
Once in the operations area, the SAND automatically deploys the two X300 AUVs with the LARS and keeps them under monitoring with the modem/USBL. As explained, all platform and payload missions are pre-planned and are conducted in full autonomous mode, including the detection of targets of interest. At the end of the mission, the two AUVs return to surface for the recovery phase controlled via wi-fi from the mothership and from the ground station, within range of the LOS UHF radio link up to 8 nm. In the future, when the SATCOM link will be available, the SAND will be able to send collected data to the C2 station or to over-the-horizon sites. The communication link will switch between the two means automatically when required.
The SAND has been designed to endorse the standardization aspects of the emerging STANAG 4817, like the CATL (Collaborative Autonomous Tasking Layer) interoperability protocol, which was demonstrated by the La Spezia-based NATO Centre for Maritime Research and Experimentation during REPMUS 2021 and 2022 in accordance with the ongoing development by NATO Nations..
“Fincantieri NexTech is working on the SAND to develop it into a proven solution to be added to its portfolio by 2024”, Mr. Orsini concluded.
Photos by L. Peruzzi

