

iMUGS Demo6: the first scenario

The initial phase, reconnaissance, of iMUGS Demo 6 was already outlined in the previous section of the article. With the outcome of the reconnaissance carried out autonomously by UGVs, the commander in the C2 shelter can now task a tactical unit that shares the same COP. A covering group takes place on a small hump in the terrain, placing a machine gun that will provide supporting fire to the assault group. All German Army soldiers performing at Lehnin belonged to the Test and Trial Unit part of the Army Concepts and Capabilities Development Centre. The covering group was reinforced by two UGVs, a Milrem Robotic THeMIS, kept in reserve for possible CASEVAC missions, and a Diehl Defence Ziesel, a lighter and smaller UGV that can easily move in woods, tasked for resupplying the unit and carrying heavy weapons.

Once the covering group reached its positions, the assault group was tasked to hit the small village moved in, accompanied by another Ziesel UGV, also tasked for logistic support. The three UGVs that carried out the recce mission in swarming fully autonomous mode were re-tasked to provide screening to the incoming soldiers, who will then immediately be warned should enemy activity be detected.
As soon as soldiers reached the starting line the screening was not needed anymore, so two THeMIS were re-tasked for another mission, carrying out a feint towards the enemy who opened fire against them, revealing its position. The assault group approached the village, the Ziesel following close; in a real case it might be loaded with grapnels, ladders and breaching equipment, which can be of great use in an urban area.
While most of the sensors that should have been installed on UGVs were fictional, one of the THeMIS was fitted with a laser warning system; should this be illuminated by an enemy laser system, it would immediately send upon the C2 chain the data that would become available in real time to all friendly players on the battlefield.
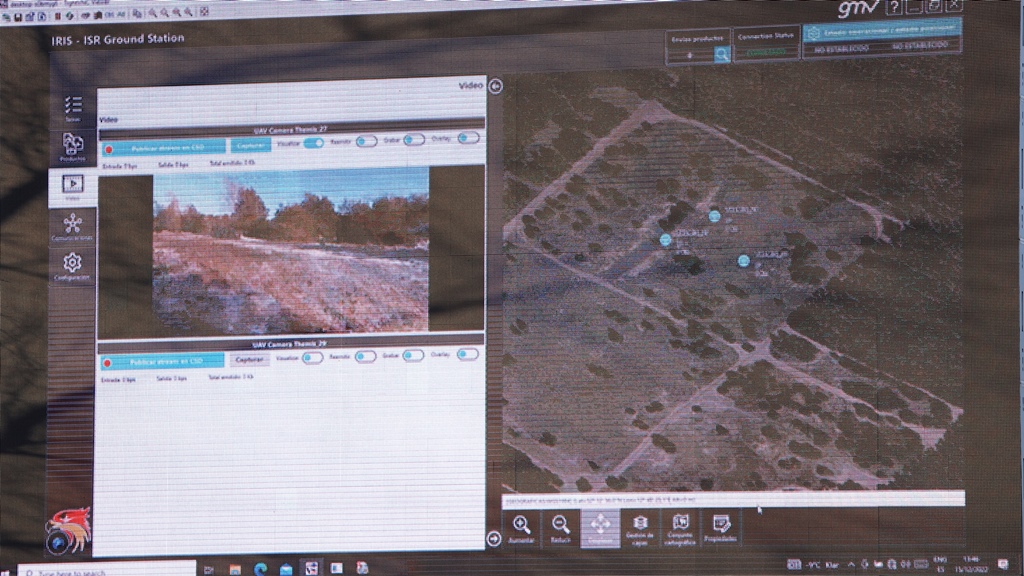
During the demo it was made clear that swarming capabilities are not limited to ground robotic vehicles. “The swarming system is capable to select by itself the type of assets that are needed among those available, therefore it can use UGVs only, UAS only, or both types, depending on the combination the system deems the most effective to achieve the mission. That said, the C2 operator can obviously input his own requirements in terms of assets, movements, forbidden areas and so on, these parameters being taken into consideration by the algorithm that will operate accordingly. Should the mission be impossible to achieve within assigned parameters, it will warn the operator,” EDR On-Line was told. During the demonstration two AtlasPRO UAVs were used, both provided by Atlas of Latvia. Increased pace, better logistic resupply, faster casualty evacuation, and even more important reduced risks for personnel during reconnaissance and screening operations, were well demonstrated in this first phase of the event.
Phtos by P. Valpolini


