

RAS Experiment Spiral 1: the Italian Army looks to the future
The Italian Army Robotic Experiment Open Day, which took place on February 16th in Rieti, in the nuclear-biologic-chemical training area part of the Joint NBC School, marked the end of the first spiral of the RAS (Robotic Autonomy System) programme which was started in 2020 by the Army HQ.
The RAS programme was the first experimentation campaign to be launched by the newly formed Army Innovation Office, which is tasked to carry out the Concept Development and Experimentation cycle designed by NATO within the Italian Army. It is therefore based on three branches, Concept Development, Doctrine and Standardisation, and Experimentation and Lessons Learned.

To understand the potential impact on RAS technologies at 5-15 years distance, the experimentation work was started gathering academia, research centres and industry, which answered the Technology Call launched by the Army Innovation Office. This allowed to identify potential partners interested in taking part in the experimentation, allowing on one hand the Army to better understand which capabilities are already available and how much these impact on doctrine, training and operations, while on the other non-military participants could better focus which are the real need of the Army, better orienting their activities.
A first Capability Spotlight was organised in October 2020, with a first demonstration of ground and air unmanned vehicles supporting an infantry section playing one of the vignettes, all related to urban terrain, that were considered for the project.
The next step saw the issue of a Request for Proposal, through the NSPA (NATO Support and Procurement Agency) to identify a System Integrator capable to handle the organisational aspects of the programme and provide metrics for the evaluation phase. Milrem Robotics was selected for this role and won a five years framework contract that will allow the Italian Army to pursue its evaluation of RAS in the coming years, which will be crucial as the service is about to launch a modernisation plan for its heavy forces, which will certainly see UASs and UGVs operating alongside manned platforms such as main battle tanks and armoured infantry fighting vehicles. These will act as force multipliers, allowing to split effects on a number of platforms working together in a synergistic mode, which will also result in keeping under control the mass of the heaviest and biggest platforms, bringing them back to values that are compatible with infrastructures such as roads and rails, inherently enhancing their mobility.

However for the time being the first spiral of the programme was aimed at supporting light infantry operating in urban scenarios. The experimental campaign aimed at getting three outputs, RAS-enabled concept of employment, updated RAS strategy and requirements definition from the research-development-validation loop, that was based on three main inputs, scenario, operational problems and RAS architecture.
As said, the reference scenario was a degraded urban scenario, three priority operational functions being considered, command and control (C2), intelligence, and logistic support. The three vignettes were respectively: moving towards an urban area; building clearance; resupply.
Hardware and software
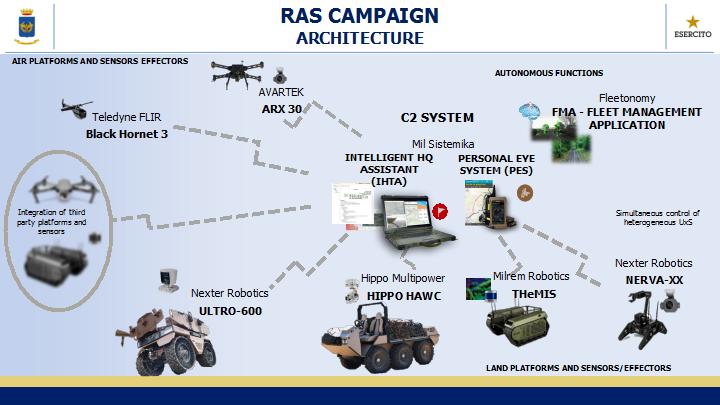
The Italian Army RAS experiment system architecture sees the command and control function as the centre, which exploits the capabilities of MIL Sistemika IHTA (Intelligent HQ Tactical Assistant), a powerful tactical tool specifically designed by the Slovenian company to cope with complex C2 challenges, and the PES (Personal Eye System), a personal tracking, navigation and data sharing application developed by the same company allowing controlling multiple UGVs. Autonomous navigation is also ensured by the FMA (Fleet Management Application) software platform, developed by Fleetonomy of Finland. It is designed to enable cooperation between fleet operators, autonomous vehicles, sensors and decision making systems in urban and other complex environments.

Coming to the platforms, two UAS are part of the Italian Army RAS experimentation. The first one is the well known Black Hornet, of Norwegian origin and now part of the Teledyne FLIR portfolio. With a weight burden for the soldier of less than 33 grams it ensures 25 minutes of beyond line of sight (B-LoS) situational awareness, day and night, at up to 2 km range. For getting an overall coverage of the operation area the selected UAS is the ARX 30, designed and produced by Avartek of Finland. Fitted with eight rotors, two counter-rotating per each spar, the UAS gross weight is around 23 kg with typical on-board equipment and a battery configuration ensuring 60 minutes endurance. It carries a 10 kg payload for sustained operations, however the maximum take-off mass can reach 43 kg for short term flights. Fully build in carbon fibre, it can reach a cruise speed of 10 m/s and has a range of over 30 km.
Back on the ground, the bigger UGV that is part of the experimentation is the one provided by the system integrator itself, the well known THeMIS by Milrem Robotics. The 750 kg rated payload of this tracked platform make it ideal for resupply missions (maximum payload is 1,200 kg), however its dimensions, 2.4 x 2.0 meters in length and width, can become a problem in some very secluded scenarios. To check both tracks and wheels, the Italian Army took on board the Hippo HAWC, developed by Kansas-based Hippo Multipower of the US, a 6×6 platform 3.8 meters long and 1.65 meters wide, with a kerb weight of 1,940 kg and a 1,000 kg payload. This usually includes driver and passenger, but in the unmanned version these of course are not present, therefore the full payload, minus the autonomy package weight, is available.

A smaller UGV, the Ultro-600 developed by Nexter Robotics of France, provides an alternative when a smaller transport UGV is needed, as this 6×6 is 1.97 meters long and 1.30 meters. While smaller in size, which favours mobility in secluded terrain such as forests, it maintains a considerable payload as it can carry up to 600 kg, its kerb weight being 800 kg.
While all aforementioned UGVs feature hybrid propulsion, which ensures a longer endurance, smaller UGVs used mainly for reconnaissance have an all-electric powerpack. Two models from Nexter Robotics were seen at the Rieti event, both belonging to the Nerva family. The wheeled 4×4 Nerva LG weighs only 4 kg and cab thus be easily transported by a single soldier. It can be thrown from a vehicle or through a window (depending on the payload), and ensures a one hour mission. It can be fitted with a track kit when higher mobility is required, for example descending or climbing stairs, and in this configuration it was employed during the demo for a recce mission while a wheeled one ensured the radio relay function. Nexter also provided the Italian Army with its tracked Nerva XX, also used for reconnaissance missions in difficult scenarios, its flippers ensuring a greater obstacle crossing capability.
While it is useful to know the hardware and software involved, the aim of the experiment is definitely not that to test equipment, but rather to exploit selected items in order to trial the use of unmanned in operational scenarios to evaluate their usefulness.
Validating the first spiral
As said the February event marked the end of the first spiral of the Italian Army RAS experiment, which started with the research phase that included table top and simulated exercises as well as a field familiarisation phase for operators and commanders, followed by the development phase, here too with a simulated exercise followed by field trials, splitting operational issues to allow better understanding and evaluation. Finally came the validation phase, of which the demo was the very last event.
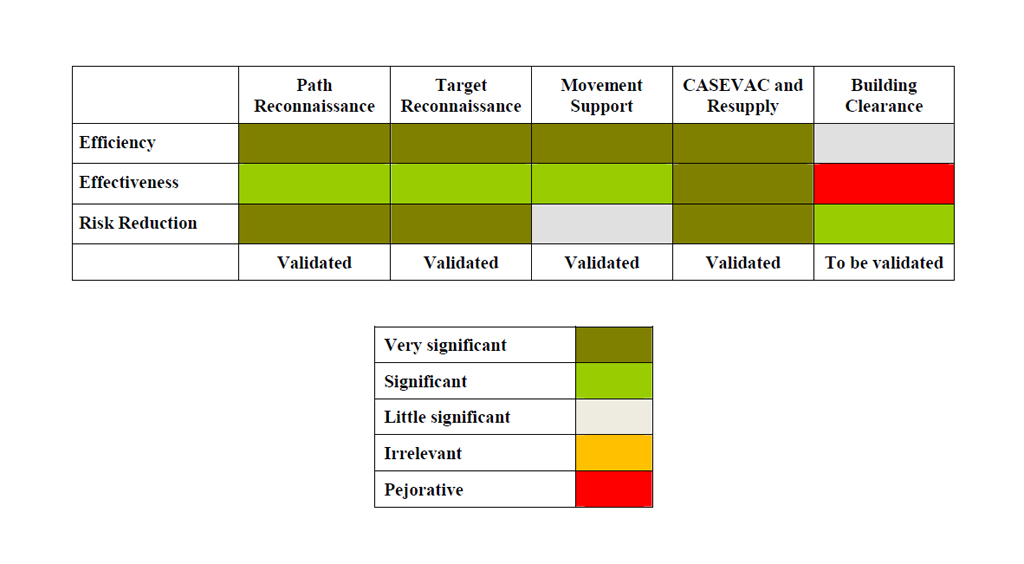
Five operational scenarios were considered, and for each one three parameters were considered, effectiveness, efficiency and risk reduction, five levels of appreciation being available, highly relevant, relevant, slightly relevant, non relevant and worsening. Results are summarised in the table.

The first case study was a route reconnaissance. Here the use of RAS made of the whole C2 suite, the Nerva XX and the two UAS, allowed to reduce unknowns on the route itself and on enemy activities, also thanks to the capacity to provide B-LoS imagery. The second case was target recognition, and here only UAS were employed the C2 suite remaining the same. The two types of UAS were exploited at different heights and distances from the target providing a full picture to the unit commander. Supporting the movement of an infantry platoon from the tactical assembly area to the line of departure was the third case study. Here all medium-size UGVs were involved together with UAVs, two UGVs being used for carrying soldiers equipment while a third one was kept for CASEVAC missions. Only risk reduction was considered slightly relevant, as in such a mission robotic vehicles do not replace the soldier as in previous ones, but work along it. It is however to note that allowing soldiers to move with only their one-day tactical backpack is in itself a risk reduction, as their mobility is considerably increased compared to that of a soldier with the burden of his full rucksack.

The CASEVAC and resupply case was the one that was validated with the highest marks in all three parameters, which is quite obvious considering the systems load capacity and the fact that no single soldier is put at risk. This means that the platforms used, mainly in the waypoint mode, performed well and thus this technology is considered mature, AI-based algorithms supporting full autonomous mobility being expected to further increase performances. Here too the bigger UGVs were used, together with both UAVs providing a full real-time situational awareness picture. All four case studies described were thus fully validated by the industrial-military team conducting the evaluation phase.
Only the last case study, building clearance, remains to be validated, results obtained during trials showing that the use of RAS in such a scenario, while lowering risks, does not provide sufficient efficiency and effectiveness. Moreover medium-size UGVs proved to be too noisy to be used in a situation where stealthness is often a key element.

Some complementary activities were also carried out during the Italian Army RAS Experiment – Spiral 1, one of them being shown in Rieti in a second phase of the demonstration. Using the SAGUVET, an acronym for Universal Vehicle Autonomous Driving System, developed by LEM, a company based close to Rome, an LMV 4×4 light armoured vehicle produced by IDV was first driven by teleoperation, and then moved in full autonomy on a course within the training area. The drive by wire kit includes a vision integrated system with cameras and LIDAR, IMU and odometry sensors being also installed, a computer that transforms sensors data as well as commands coming from ground control station, via long range radiolink, 4G or WiFi, in inputs for the interface between the driving kit and the vehicle original commands. As the Italian Army is close to replace many of its armoured vehicles currently in service, using tjose legacy platforms as autonomous or optionally-manned assets might allow to exploit their capacities, while not putting at risk human lives.
The future
What was briefly demonstrated in Rieti was the result of the first spiral of the programme. In perspective the Italian Army is looking at using UGVs for what it defines “Distributed Logistics”, where autonomous systems might considerably help in speeding up the resupply and CASEVAC missions on the “last mile”, when troops are in close contact with the enemy. This will also allow to increase the dispersion of logistic assets and to reduce the number of troops involved.

For Spiral 2 five vignettes have already been identified: Class II (medical) and Class V resupply to a unit in TIC (Troops In Contact); CASEVAC from the Point of Injury to the Casualty Collection Point, and then Forward MEDEVAC to Role 1 or Role 2 field hospital; reconnaissance of Lines of Communication (LOC) and evaluation of the LOC efficiency using appropriate sensors; MUM-T convoy; vehicle recovery and movement to the rear area. The next years will see one new spiral each, that will follow what the service defined as INNOVARMY, a process that starts from the definition of an operational problem, that brings to a technology call that allows identifying the right hardware, software and sensors, which will feed the research, development validation process.
Photos by P. Valpolini; graphics courtesy Italian Army

