

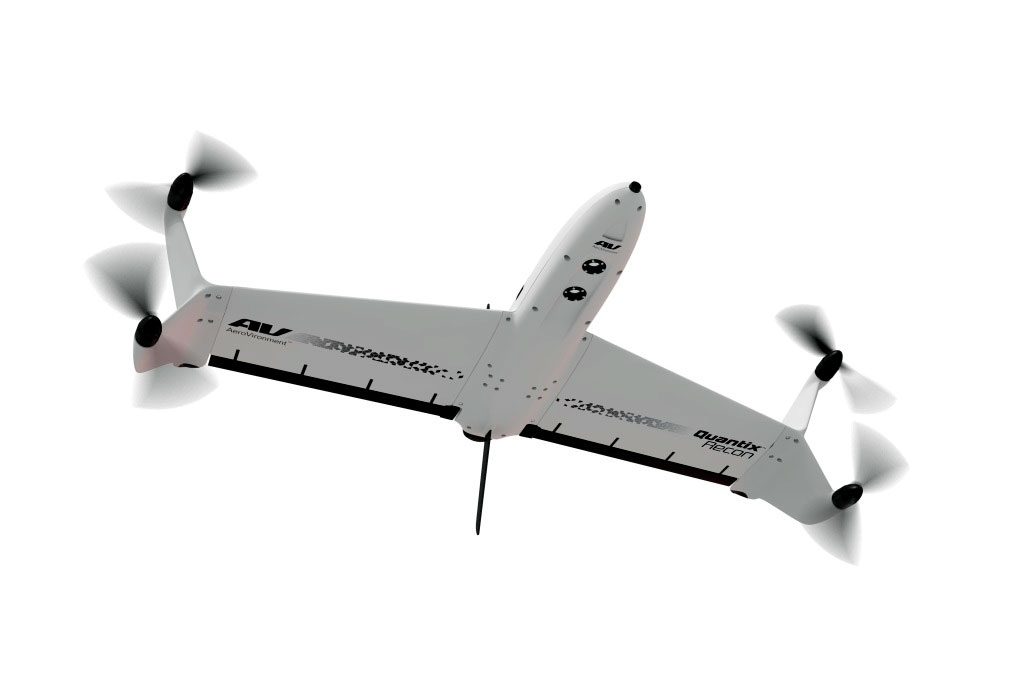
Quantix Recon: a mapping UAV from AeroVironment
The designer and manufacturer of the Raven, one of the most widespread UAVs of the fixed wing hand launched category, AeroVironment portfolio also includes the lighter Wasp and the heavier Puma, while the most recent adds-on are the Vapor rotorcraft UAVs, available in two models. In late April 2020 the California-based company unveiled a hybrid reconnaissance system, the Quantix Recon, capable of vertical take-off and landing and flying horizontally exploiting the lift provided by its wings while the four rotors/propellers provide the necessary thrust.
Its first international appearance would have been at Eurosatory 2020, but this will not be the case, so here are some details on the last product from AeroVironment.
The standard systems come in the form of one airframe, one ruggedized Ground Control Station (GCS) tablet, three spare batteries and some spare propellers. “We felt no need to add to air vehicles as due to its VTOL capability the Quantix Recon is less prone to damage, the only spare parts are the rotor/propeller, which can be easily replaced by the operator on the field,” Brian Young, Product Line General Manager Tactical Unmanned Aircraft Systems tells EDR On-Line.

The airframe is compact, its dimensions without propellers being 518 mm long and 381 mm high, wingspan being 975 mm. Four direct electric drive motors are fitted in pair at the end of the wing, which features Y-shaped winglets hosting the motors to which the two-blade rotor/propellers are fixed, their diameter being around 210 mm. The operational deployment package is contained in a hard case weighing 30 kg and measuring 1.07 x 0.66 x 0.52 meters; however when unpacked the system components weigh 5.45 kg, 2.27 kg being the take-off weight of the air vehicle.

“We developed the Quantix Recon aimed at the military market leveraging a similar product dedicated to the commercial market, so the airframe was basically there and we mostly had to work on software development,” Young adds, explaining that the system was developed from inception to be an easy to use mapping tool.
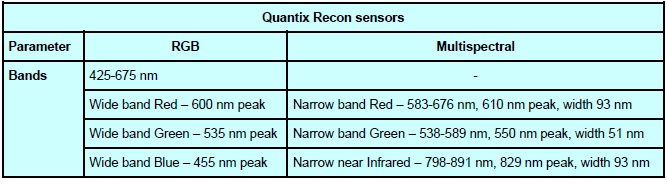
Its capacities are based on the two sensors are located forward under the fuselage, the front one being a colour 18 Mpixels sensor generating 4864 x 3648 pixels images, the one installed slightly backwards being a multispectral sensor providing 2432 x 1824 pixels images. The latter sensor is based on a single camera with red, green and near-infrared filters capturing images in their respective bands.
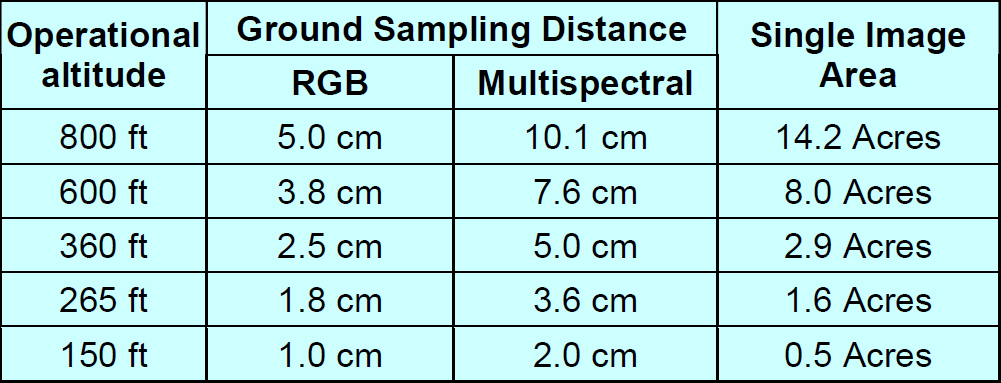
The capture rate is automatically adjusted in order to maintain the overlap between successive images, both sensors ensuring 85% front overlap and 60% side overlap. Operational altitude ranges between 150 and 800 feet (45 – 245 meters), ground sampling distance and single image area coverage depending on the selected altitude.
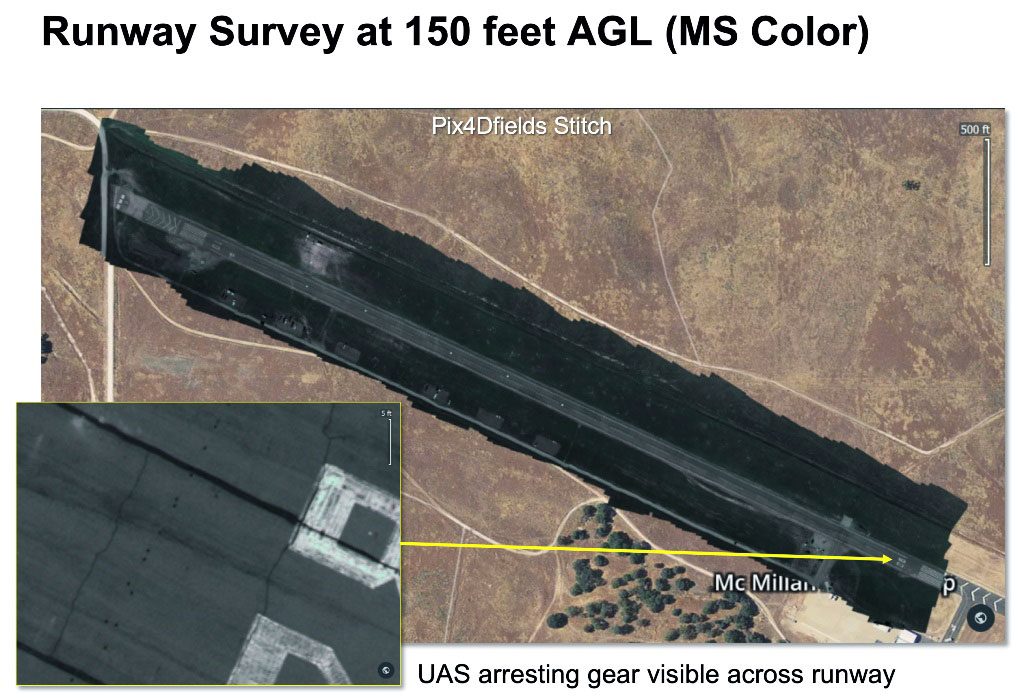
Different mapping modes are available, area, waypoint and linear, the system being fully automated thus allowing hand-free data collection. All images are georeferenced and are processed on board, data being stored on an SD card, and are made available instantly after landing. Imagery data is compatible with most geographic information system (GIS) analytical tools to facilitate further analysis.

The Qantix Recon hybrid architecture makes it easy to deploy, thanks o its VTOL capacity, while its horizontal flight speed is of 20 meters per second (72 km/h), which allows covering a much wider area compared to rotary wing UAVs used for that same task: the new AeroVironment UAV can survey up to 1.6 km2 or 20 linear km [1] in a single 45 minutes mission, allowed by the on-board battery.
The system is made ready to fly in less than five minutes, a 900 MHz encrypted data link being available as well as a Wi-Fi link; the data link allows controlling the Qantix Recon up to 2 km distance, however the system is born to be fully autonomous, thus the link can be switched off making it RF stealthy, as well as immune from jamming. “We tested the Quantix Recon in an anechoic chamber to verify the absence of RF emissions, and once it flies in RF Silent mode it is really passive, the only RF-based function being GPS navigation, which is passive by definition,” Young tells us. Considering its small dimensions and its low acoustic signature, according to AeroVironment it is undetectable at 120 meters distance, it is very difficult to notice it, “its low RCS making live difficult also for radars,” Young adds.

A 15 meters radius safety area is required for ground operations, although a much smaller area is sufficient for take-off and landing operations when needed; exploiting the vertical tail on both sides of the fuselage as well as its wings, the Qantix Recon can be set on the ground in the upright position ready for take-off. The motors are then switched on, and when the operator is ready he simply swipes up the arrow visible on his tablet and the aircraft rises in the sky.

When speed allows, the whole aircraft transitions in horizontal flight reaching its transit speed and aiming towards the operational area. “The fixed-wing flight speed is not adjustable, while all other parameters are set before take-off,” Brian Young says. These include mission data, such as points of interest, path and areas of interest, and advanced options such as flight level, alternate landing locations, ignore-loss-of-link, and RF Silent. Once the air vehicle is airborne the operator can only execute emergency procedures including Return to Home, Land Now, and Emergency Stop, as long as the aircraft is within data link range. If he selects Ignore Loss of Link (and is out of link range) or RF Silent Mode, then he can only wait for Quantix Recon to complete its mission.
As soon as the system completes its last imagery flight line the Quick-Look map generation starts processing the data while the airframe heads towards the landing point. “In most cases, Quick-Look is ready to transmit to the GCS tablet via Wi-Fi immediately upon landing, and only for very large missions, the data transfer to the tablet will take place within a few minutes after landing,” Young says. The software automatically reconstitutes the whole surveyed area matching and putting together the various images captured during the flight. The Quick-Look HD app that comes together with UAV allows pinch and zoom navigation down to the ultimate ground sampling distance, which is 10 mm for the colour visual sensor and 20 mm for the multispectral one, when flying at the minimum operational altitude. Usually the first look considers the whole mapped area; clicking on a spot on the touch-screen allows pulling up geo-referenced high-resolution images for closer analysis, the third step being to pinch and zoom on most critical details. The operator can also remove the SD card, after having removed the battery, the card being then inserted into the tablet to view the full high resolution pictures and eventually run some more sophisticated software for deeper analysis and 3D maps. The multispectral sensor allows specialised personnel to exploit data for complex operations, such as planning a counter-IED mission, looking for helicopter landing zones, or identifying strips of terrain with sufficient length and width and with an even soil where to potentially land tactical transport aircraft, these being only a few examples.
Turnaround time is very short, a few seconds for removing the battery and the SD card, replace them, and run the pre-flight check programme, the air vehicle being able to take off within 5 minutes.
The Quantix Recon is in production, a small number of systems having already been sold to military and government organisations.
To view the Quantix Recon video please click HERE
Photos
courtesy AeroVironment
[1] This is 20 km straight “out and back” from/to the take-off location. If the operator decides to land remotely, Quantix Recon can map a 40 km linear corridor and land at a location away from home.


